Introduction
As the demand for automation increases, the role of service robots has become increasingly significant. Among the various technologies that empower these robots, Laser SLAM (Simultaneous Localization and Mapping) stands out due to its precision and efficiency. This article delves into the applications of Laser SLAM in service robots, such as commercial cleaning and delivery robots, while also addressing the challenges faced in real-world environments.

Applications of Laser SLAM in Service Robots
- Commercial Cleaning Robots
- Laser SLAM technology enables cleaning robots to autonomously navigate and map indoor spaces. By utilizing laser sensors, these robots can create accurate maps of their environment, allowing them to efficiently clean without human intervention. They can adapt their cleaning paths based on real-time data, ensuring comprehensive coverage of areas.
- Delivery Robots
- In logistics and delivery services, robots equipped with Laser SLAM can navigate complex environments such as warehouses or urban settings. They can identify obstacles and dynamically adjust their routes to deliver goods safely and efficiently. This technology enhances operational efficiency by reducing delivery times and minimizing errors.
- Guidance Robots in Public Spaces
- Service robots used in malls or airports often rely on Laser SLAM for navigation. These robots can interact with customers while autonomously navigating through crowded spaces, providing directions or information without colliding with obstacles.
Challenges of Laser SLAM Technology
Despite its advantages, Laser SLAM technology faces several challenges in practical applications:
- Localization Accuracy in Large Environments
- In expansive areas, maintaining high localization accuracy can be difficult. As the robot moves further from known landmarks, cumulative errors can lead to significant deviations from the actual position.
- Robustness in Dynamic Environments
- Service robots often operate in environments with moving objects (e.g., people or other vehicles). The presence of dynamic elements can disrupt the mapping process and affect the robot’s ability to navigate effectively.
- Sensor Limitations
- While laser sensors are effective, they may struggle in certain conditions such as bright sunlight or reflective surfaces, leading to inaccuracies in data collection.
Potential Solutions
To address these challenges, several strategies can be implemented:
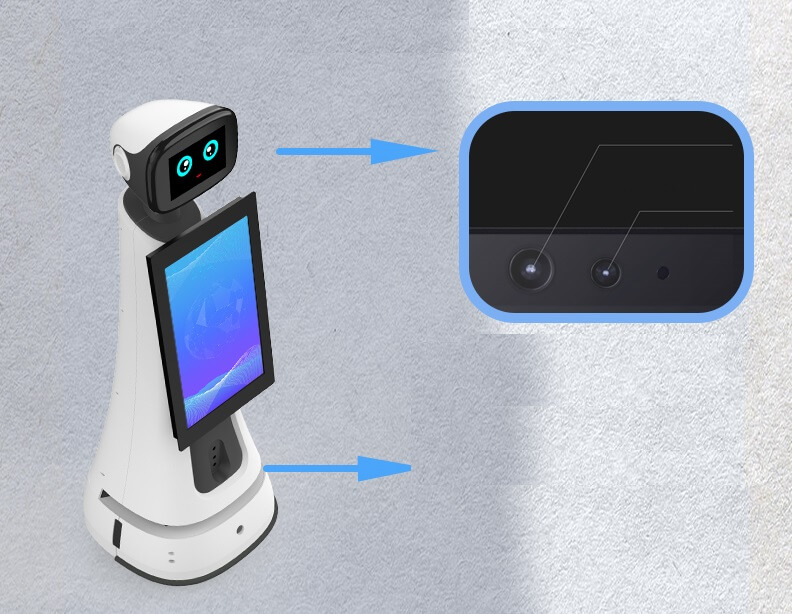
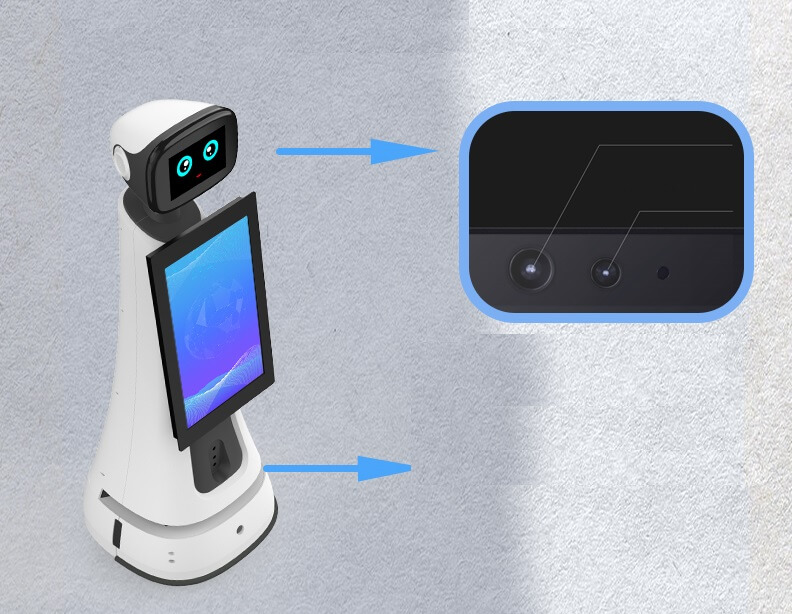
- Combining Visual SLAM with Laser SLAM
- Integrating visual data from cameras with laser data can enhance the robustness of navigation systems. Visual SLAM provides additional context that helps improve localization accuracy in complex environments.
- Multi-Sensor Fusion
- Utilizing multiple types of sensors (e.g., ultrasonic sensors, IMUs) can provide a more comprehensive understanding of the environment. This fusion allows for better obstacle detection and improves overall navigation performance.
- Advanced Algorithms
- Implementing more sophisticated algorithms that adapt to changing environments can help mitigate issues related to dynamic obstacles. Machine learning techniques can also be employed to refine mapping and localization processes over time.
Conclusion
Laser SLAM technology is pivotal for the advancement of service robots across various sectors. While it offers significant benefits in terms of navigation and mapping capabilities, challenges related to localization accuracy and dynamic environments remain prevalent. By leveraging complementary technologies such as visual SLAM and multi-sensor integration, these challenges can be effectively addressed, paving the way for more reliable and efficient service robots in the future. This exploration highlights both the potential and limitations of Laser SLAM technology in service robotics, emphasizing the need for ongoing innovation to enhance robotic capabilities in real-world applications.