Every idea of any Utopian world is incomplete without robots and their ubiquitous presence. While robots have been increasingly used in factories and warehouses of late, they are yet to penetrate the B2C markets and reach consumer homes. And programming robots for a variety of tasks in a household is extremely challenging manually and equally intricate to automate using any end-to-end learning technique.

Mobile ALOHA
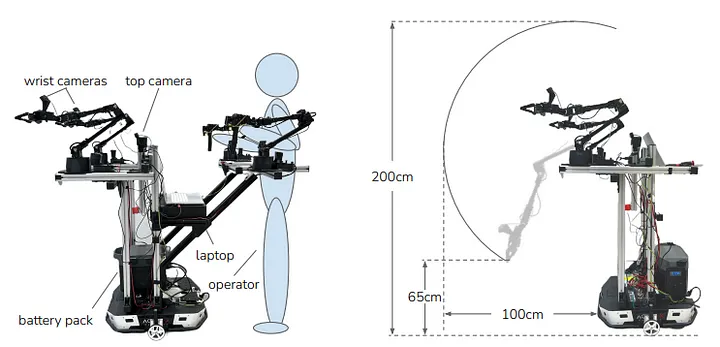
Meet Mobile ALOHA, a new platform by Stanford folks who have made robot training easier and extensible. Their paper introduction says — We introduce a low-cost mobile manipulation system that is bimanual and supports whole-body teleoperation. The system costs $32k including onboard power and compute. It is an extension of the ALOHA platform, that some of the authors of M-ALOHA previously built. ALOHA uses two 6-DOF robot manipulators on a tabletop that can be tele-operated using another set of the same robots. M-ALOHA extends the same platform with a mobile robot base. It augments the dexterity and maneuverability of the platform.
Training Methodology
Mobile ALOHA uses imitation learning and behavior cloning techniques to learn from simple examples of robots performing household tasks. The robot can then perform the same tasks tasks autonomously adapting to unique challenges in the environment and variations in the scene or the task itself. Historically, imitation learning techniques have been limited to manipulation tasks done in static environments with robots having limited workspace and dexterity. The robot base adds extra degrees of freedom that the robot can use to perform learned tasks. To teach the system, a human operator stands behind the robot and controls the two teacher manipulator robots while the actual robots in the front imitate the behavior. The operator can also push the mobile base around since it is tied to the operator. This lets the operator exploit its mobility and perform non-table-top tasks by increasing the robot workspace. For static tasks with a workspace extending outside the reach of the stationary robot, the mobile base simply adds more degrees of freedom and reduces singularity issues for the two manipulators.
Our Improved Robot Chassis
We have developed a new lightweight robot chassis for mobile manipulation robots like Mobile ALOHA. By reducing the weight of the chassis by 30%, our design enables faster acceleration and movement of the robot base, allowing it to complete household tasks more quickly and efficiently. The LiDAR it uses also provides increased mapping and obstable avoidance ability. This improved chassis expands the dexterity and versatility of mobile manipulator robots for real-world applications.
Learning Methodology
M-ALOHA uses the ACT technology (Action Chunking With Transformers) from the original paper. The RGB images from the wrist cameras on the robot arms and another camera on the platform along with the robot joint angle sequence help learn the tasks. The authors used Diffusion Policy and VINN imitation learning techniques along with ACT in the paper. Diffusion policy trains a neural network to gradually refine the action prediction while VINN trains a visual representation model to retrieve actions from demonstration dataset with nearest neighbors. ACT is still used in the co-training pipeline.
Conclusion
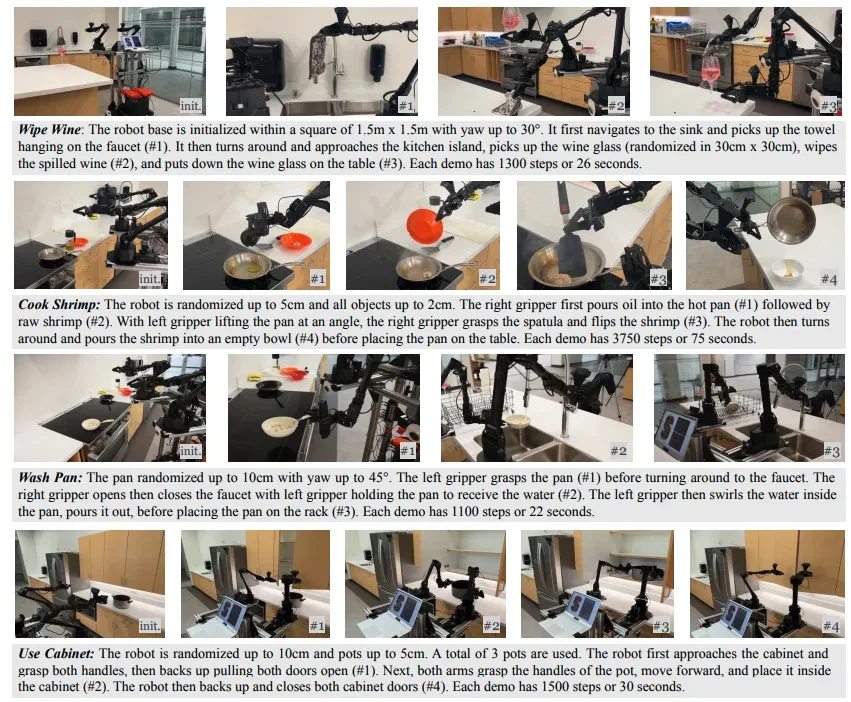
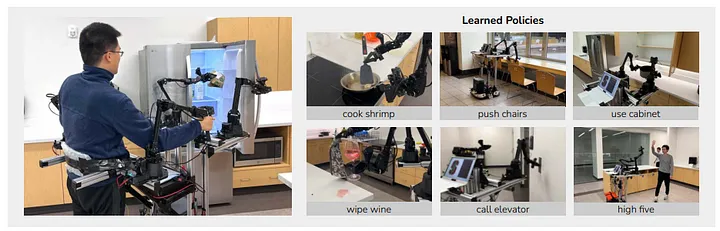
The captured steps are then used across multiple examples to learn the task. As per the authors, with 50 demonstrations for each task, co-training can increase success rates by up to 90%, allowing Mobile ALOHA to autonomously complete complex mobile manipulation tasks such as sauteing and serving a piece of shrimp, opening a two-door wall cabinet to store heavy cooking pots. The ablation study concluded that Data Efficieny — Co-training helps make the dataset better and give higher performance Co-training is robust to different training data mixtures from static and mobile manipulation techniques on ACT Co-training also outperforms pre-training The platforms demonstrates how simple robot teaching techniques can make them useful for a large set of simple household tasks. Stay tuned as I bring more from the world of robotics.